


最详细的六轴机器人工作原理
六轴机器人工作原理是什么?第一我们要了解什么是六轴工业机器人。六轴工业机器人它有六个关节轴,分别是S、L、U、R、B、T轴。关节轴的旋转是由伺服电机直接通过谐波减速器、同步带轮等驱动。六轴机器人工作原理图如下:
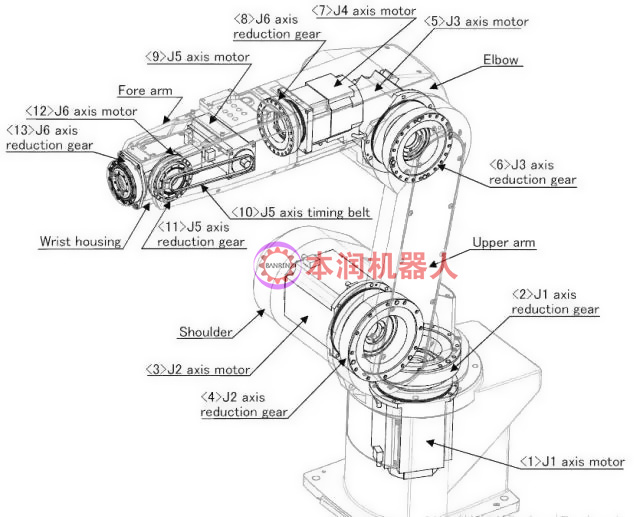
其中一、二、三、四轴的结构,关节一至关节四的驱动电机为空心结构,关节机器人的驱动电机采用空心轴结构应该不常见,空心轴结构的电机一般较大。S轴旋转,L轴下臂,U轴上臂,R轴手腕旋转,B轴手腕摆动,T轴手腕回转。
六轴关节机器人的腕部关节设计较为复杂,因为在腕部同时集成了三种运动。小型的六轴关节机器人的腕部关节主要采用谐波减速器。较为详细地描述了常见的六轴关节机器人的腕部结构,其腕部关节用到了两个谐波减速器,两个同步齿型带传动输入,中间还用到了一对锥齿轮副传动。
六轴工业机器人作为工业机器人中应用中最为广泛的类型,具有高灵活性、超大负载、高定位精度等众多优点。